At the Collaborative Research Center (CRC) 805, about40 researchers from the fields of mechanical engineering, mathematics and law work closely together. Our common goal is to control uncertainty in load carrying systems. Together, we investigate new methods for product development under uncertainty, enhance procedures in manufacturing, and establish advanced mechatronic and adaptronic technologies to stabilize load-bearing systems during usage.
Motivation
The social and economic impact of uncertainty is tremendous. This is reflected in the alarmingly high number of product recalls. At times, more than one million vehicles a year are recalled by manufacturers in the automotive industry. By controlling uncertainty, product failures can be limited, safety factors can be minimized, current oversizing can be avoided, and thus resources can be saved.
Research Programme
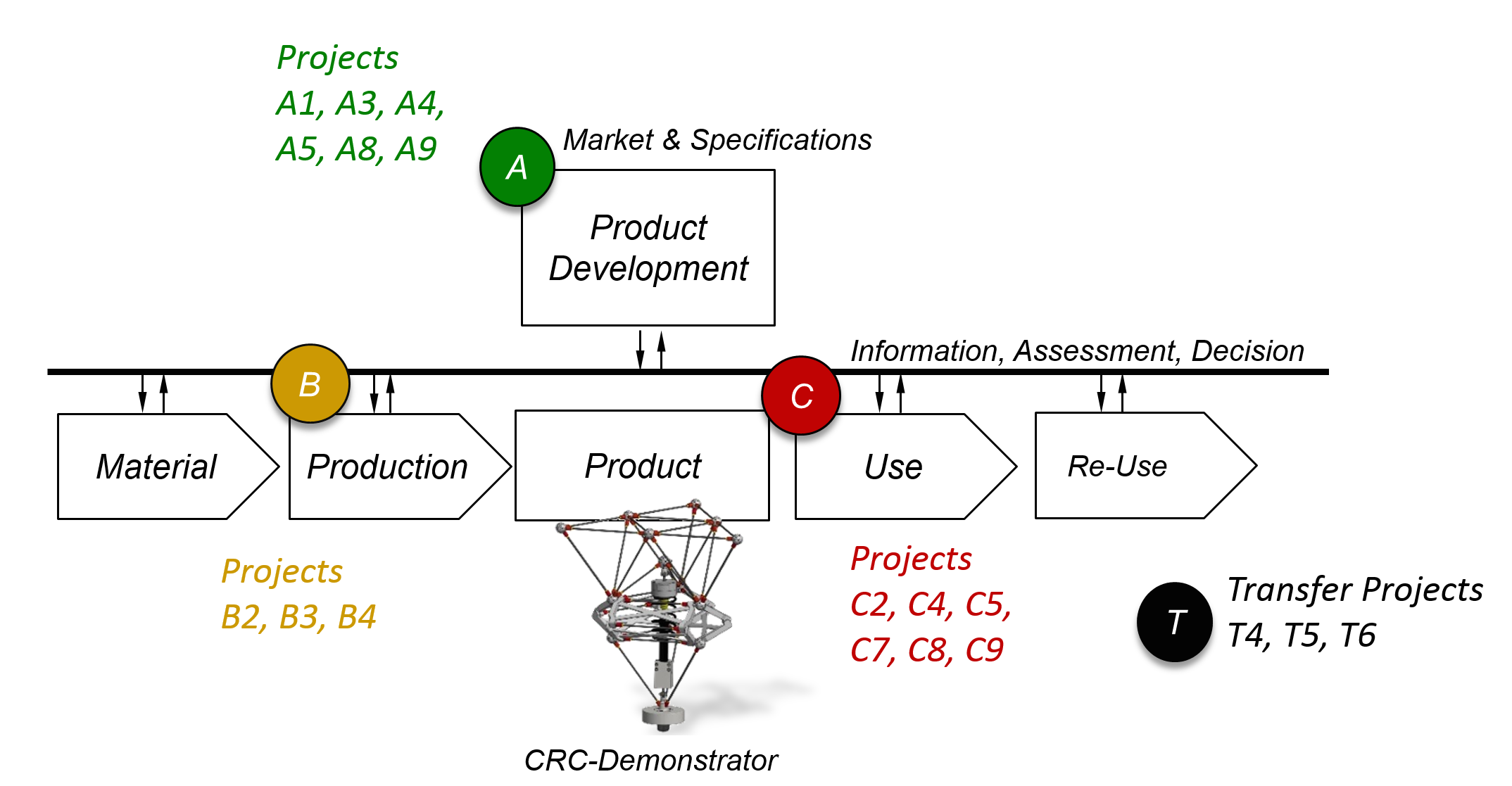
Focus of our research is a holistic approach in order to control uncertainty along all phases of the product life: from product development to production to usage. A total of 19 subprojects from the three project areas work together:
- In the project area product development, special design principles and mathematical optimization methods are developed in order to control uncertainty as early as in the design phase of technical systems.
- In the Projects focusing on the production phase, forming and cutting production processes are designed flexibly while maintaining the same production quality, and functional materials for active components are integrated synchronously with the shaping.
- In the project area usage, methods as well as passive, semi-active and active technologies are developed and tested in order to control uncertainty during the usage phase of load-carrying structures.
Scientific focus of the third funding period
The scientific focus of the third funding period is derived from the overall objective of “controlling uncertainty in load-bearing structures in mechanical engineering” as well as from the results of the first and second funding periods. After stochastic uncertainty and uncertainty have been investigated in the past funding periods, the focus of the third funding period is on controlling nescience.
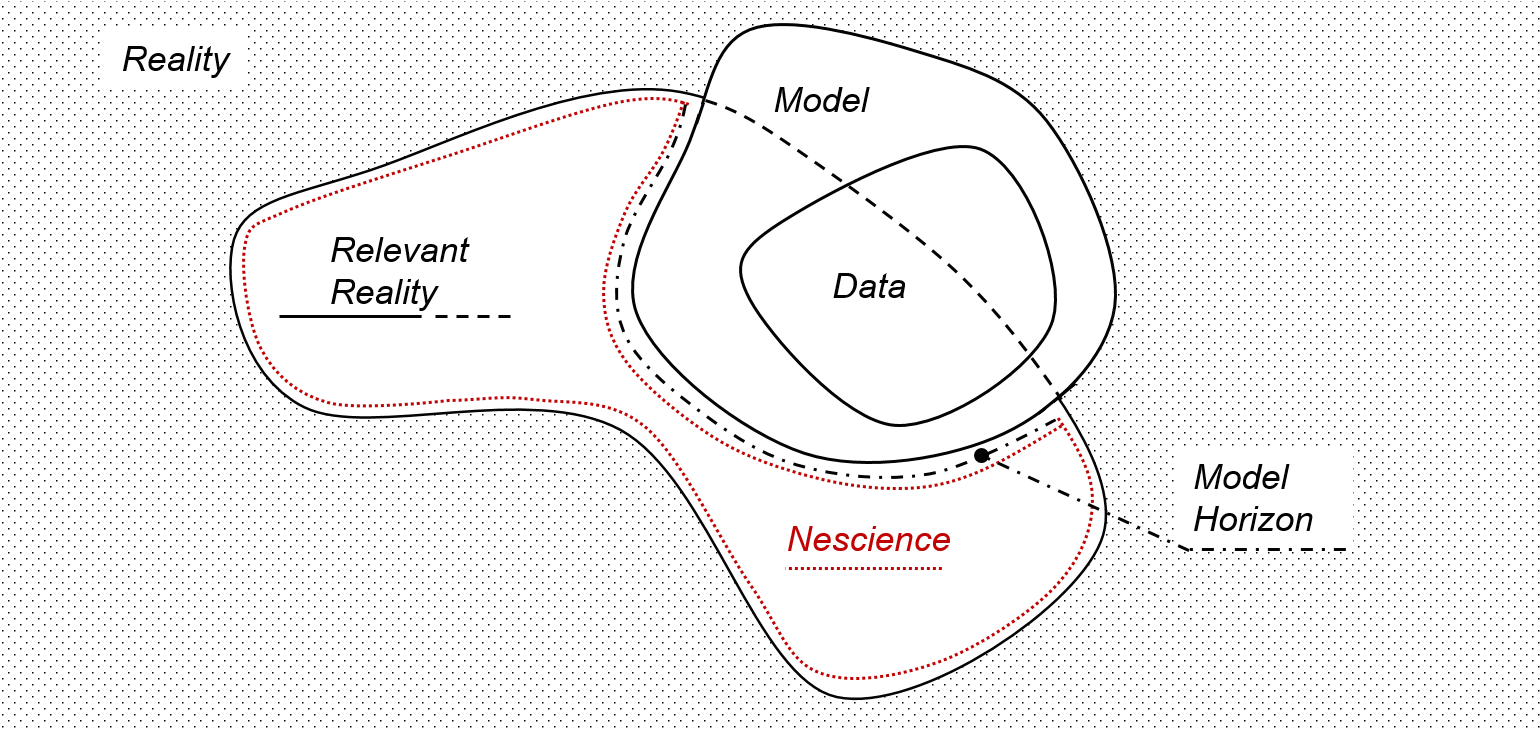
This is illustrated by the adjacent schematic diagram which was developed in CRC 805. In the previous funding periods, the assessment and propagation of uncertainty within a known model horizon was the subject of discussion. A model, however, covers only a part of the relevant reality. The rest of the relevant reality lies in the domain of nescience where the model is unknown. Nescience also manifests itself in data-induced conflicts that arise when the interpretation and use of uncertain data from more than one source leads to contradictory statements. The goal of the third funding period is to control nescience methodologically and technologically for load-carrying systems in mechanical engineering within the scope of a new research focus.
The scientific problems of the third funding period are:
- How can data-induced conflicts be solved?
- How can model uncertainty in context of nescience be recognized and controlled?
- How can resilience of load-carrying systems be achieved in order to control uncertainty?
The CRC-Demonstrator
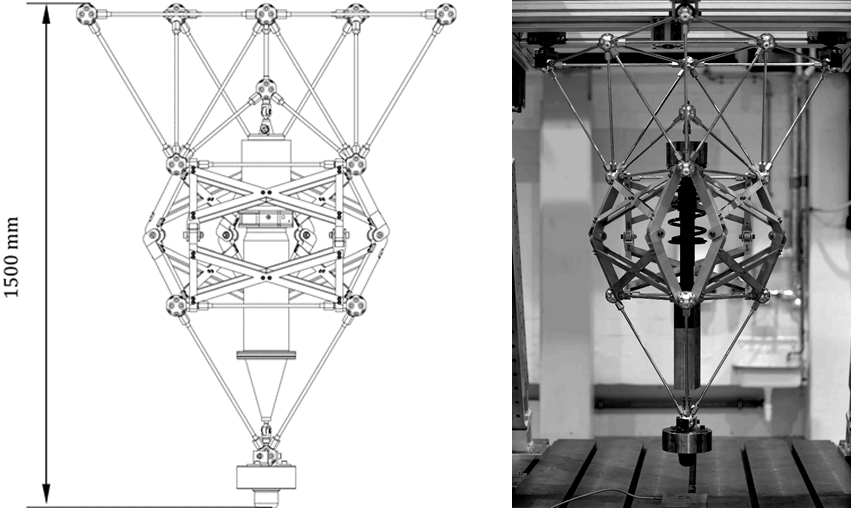
The CRC-Demonstrator serves as a platform across subprojects and makes it possible to test the developed methods and technologies for controlling uncertainty on real load carrying systems. The CRC-Demonstrator comprises a virtual and a real part. The real part includes the Modular Active Spring Damper System (MASDS). It consists of a selectively passive, semi-active or active shock absorber system serving as a pendulum support which is simply supported between an upper and a lower load-bearing structure. Joint modules ensure the kinematic connection between the upper and lower structures and the absorption of transverse loads and moments.
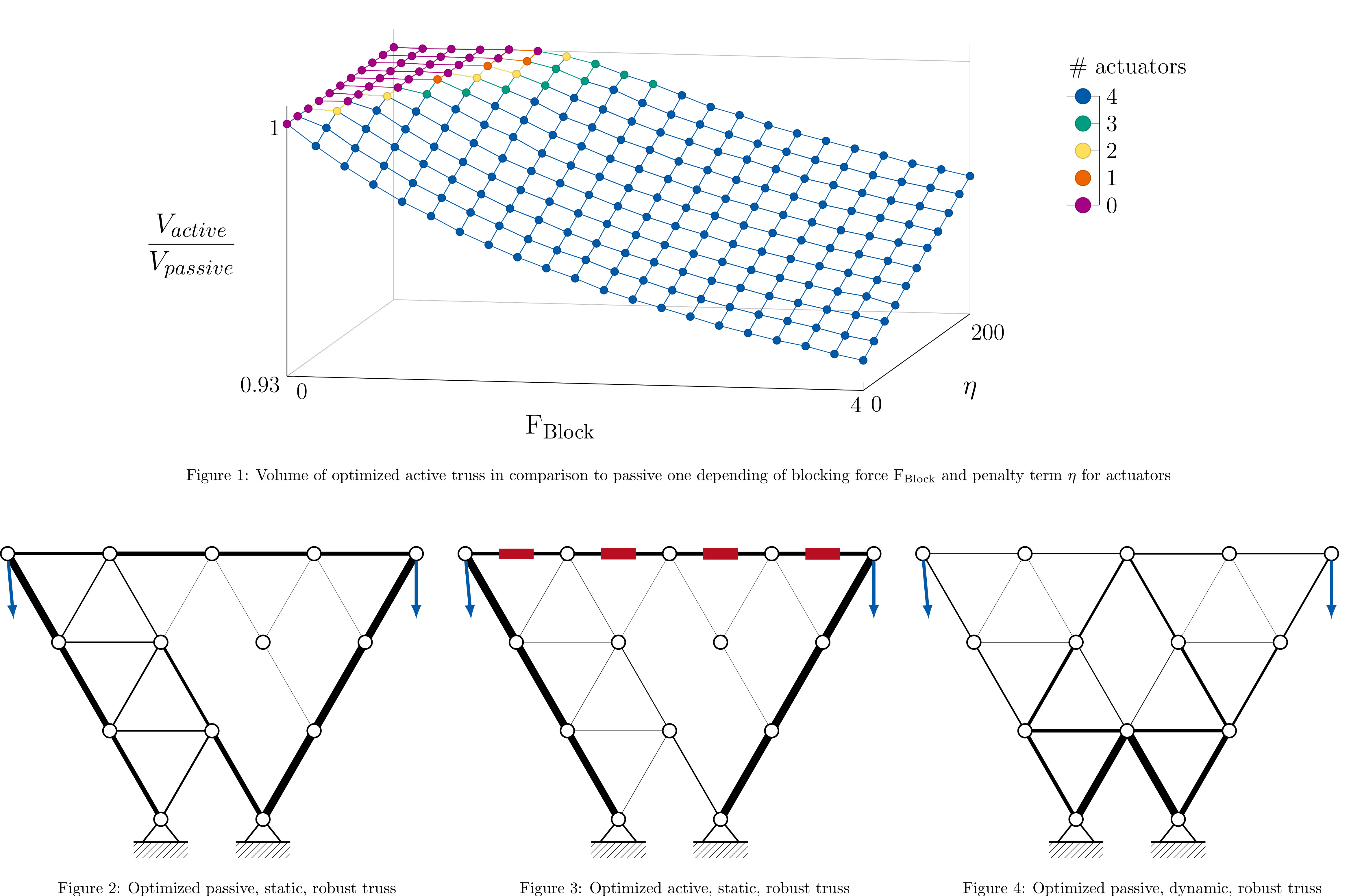
The virtual part includes, for example, investigations of topology variations for load distribution in load-carrying structures, which can not be implemented experimentally due to the high number of possible variations. The right figure shows an example result: The truss topology of the demonstrator was optimally designed for static and dynamic loads under uncertainty. For this purpose, a mixed-integer semidefinite optimization problem was modeled and solved.

